My drone challenge participation
This page is my contribution to the DIY Drones Trust Time Trial (T3) competition season 2, The model.
You can see rules and other entries to the link T3, The model
I decided to participate only 15 days before the end and it was my second automatic flight.
My config
- Quadcopter from jDRONES
- jDRONES 850KV motors
- Esc jDRONES 20A
- Lipo 3S 3000 mah
- Arducopter Firmware 3.1
- APM 2.5
- Canon S110 with CHDK, stabilized chinese gimbal

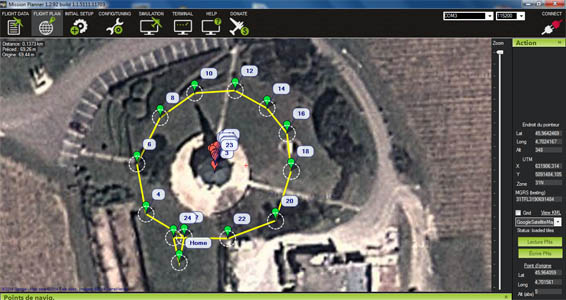
I am not professional and according to the french legislation the site must be outside cities for safety reasons. My Lipo life is around 5 minutes that's why the buiding must be quite small, with the sky free of trees for GPS reception.
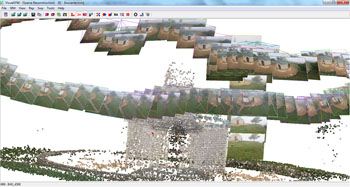
The chapel is called "Notre dame de Buisante", and is situated 30 km in the North of Lyon, France.
It was builded in 1861.